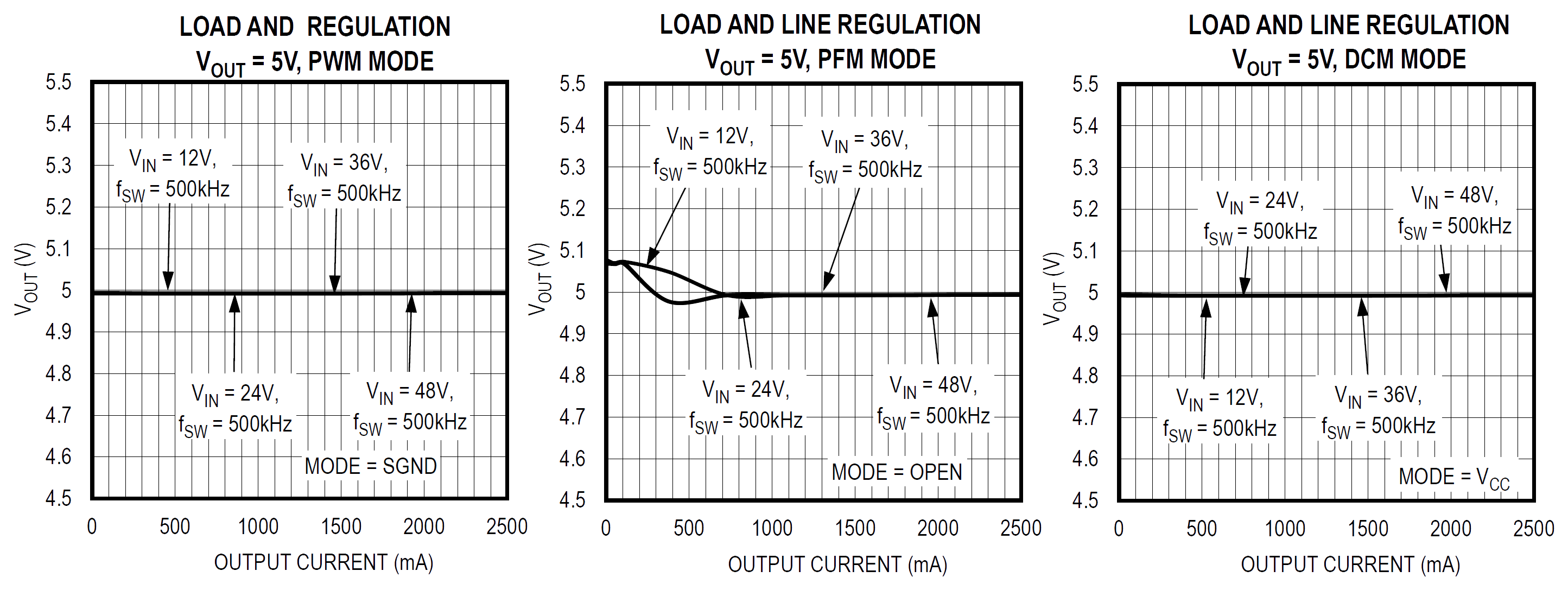
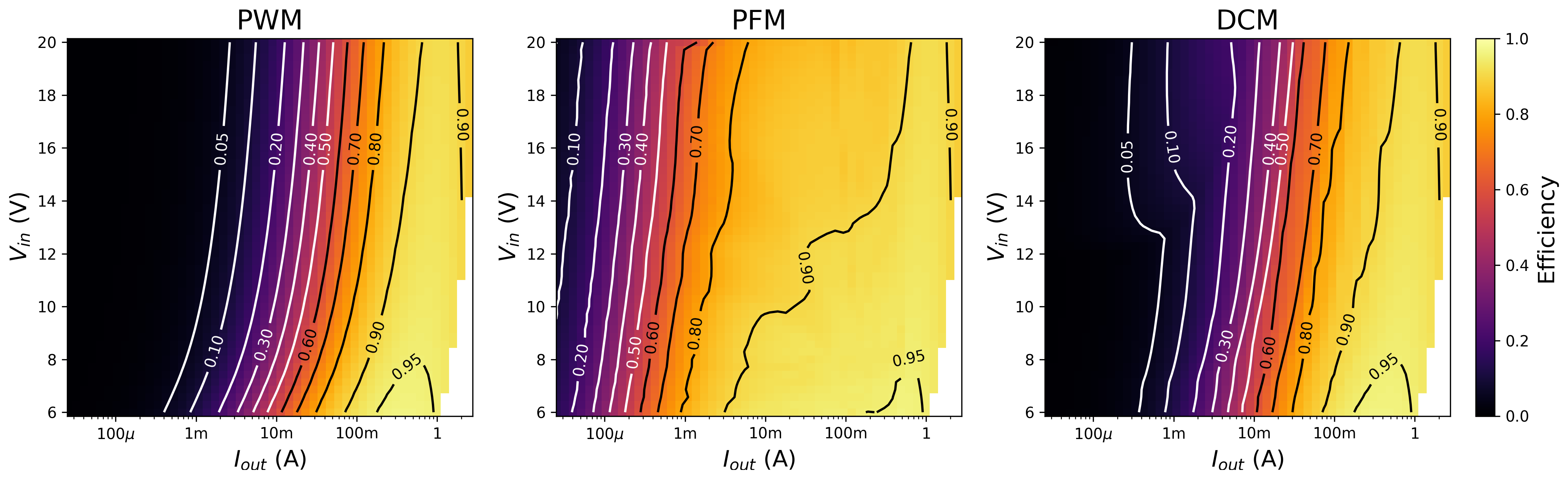
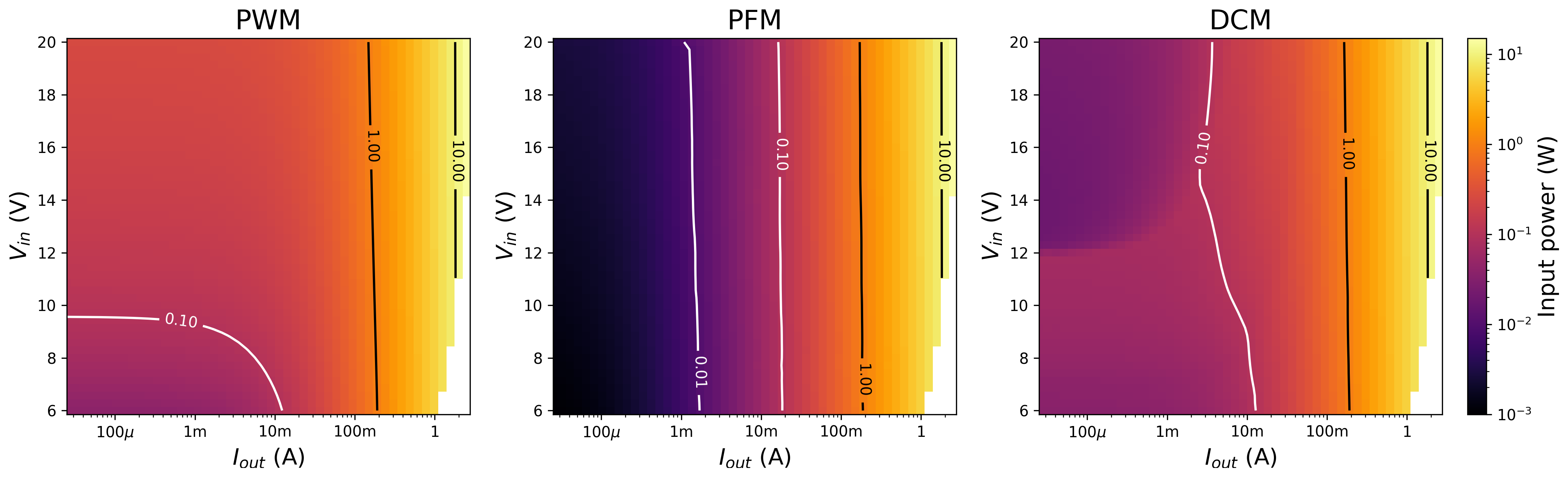
Even though the datasheet plots show the efficiency and \(V_\mathrm{out}\) at different conditions, they still have some shortcomings:
- The \(I_\mathrm{out}\) scale is linear, so it is hard to visualize what occurs at very low currents.
- The efficiency at \(I_\mathrm{out}\) <~100 mA is not plotted.
- It is not clear what happens at \(V_\mathrm{in}\) values not shown in the plots (e.g., <12 V or >48 V).
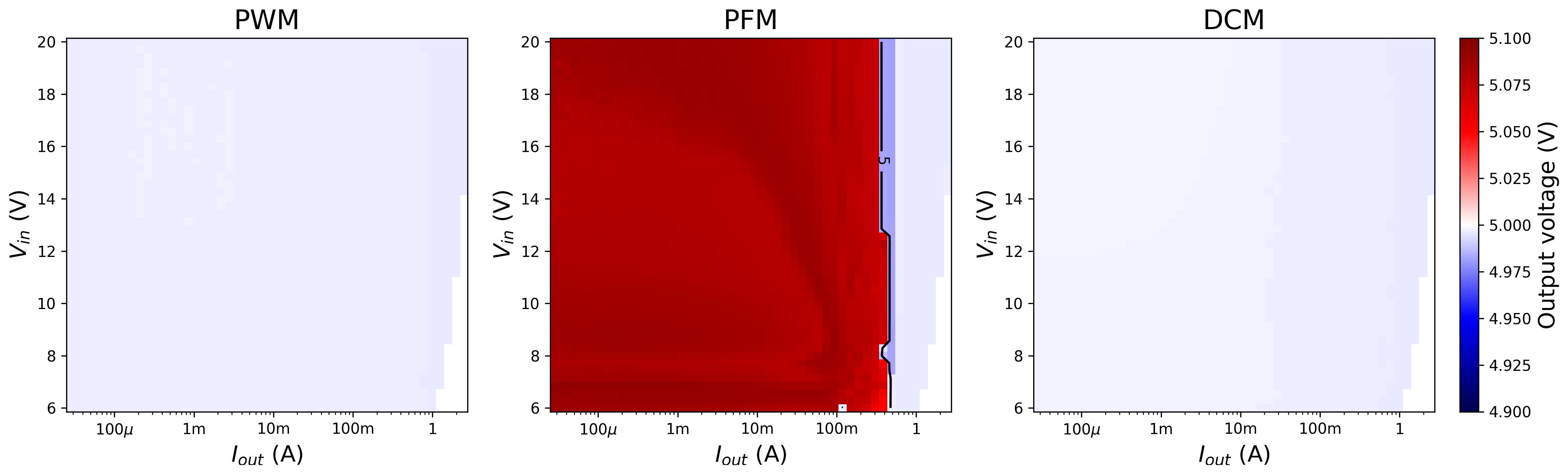
- The poorly selected \(V_\mathrm{out}\) scale makes it impossible to compare the effect of \(V_\mathrm{in}\) in the PWM and DCM modes. These plots also do not show if there are any differences between these two modes.
Let’s make some measurements to get a better picture of how the operation mode, \(V_\mathrm{in}\) and \(I_\mathrm{out}\) affect efficiency and \(V_\mathrm{out}\).